-
Riccardo the Robot
SLIMANI Anis, EVMAN L3 TD2
SLIMANI Anis, EVMAN L3, TD2
Description of the project:
The idea of this project stemmed from a prior prototype of a robot that I did last year, Cassandra. There was a lot of room to improve from the initial project and this time the main focus was in exploring movement triggered by sensors, and the limits of max in machinery. Initially this robot was supposed to include the initial features of Cassandra (the ability to detect sound and play speech) while furthering the interactivity of the human-machine interaction within this project. The new robot was supposed to be able to understand speech, process it and use AI technologies to respond in a coherent way to the visitor. This is where the project hit its first roadblock, as adaptable speech recognition technologies for MAX MSP have not yet been well-developed, and creating AI technologies is not pertinent to the class/obviously well out of my abilities. From this point I pivoted the idea, keeping the main focus on the movement aspect of the robot which interested me since the beginning of the conceptualization. This project had not only aim to fit the criteria of the class, but to also aid me in my master’s applications for human-computer interactions. Thus, I started my work by researching for references which could inspire me for the personality and the purpose of the robot. Online, in daily life, and in published media we see a constant stream which talk about “techno-panic”, the term which describes the fears that robots and AI will someday will surpass human intelligence and turn against their creators. This panic is pertinent even in present times as there is serious concerns amongst the general public that machinery and robots are taking over jobs, and many movies such as ‘Ex-Machina’, and more recently, ‘M3HGAN’ play with the themes of this public panic by having murderous AI robots as the antagonists of their films.


Ex-Machina, 2015
M3GAN, 2022
A previous CM done in EVMAN L1 (the class of Design of Interaction) focused on the specific subject of humans in interaction to technology, in which I did a research paper discussing the theory of robotics/AI and how this public panic is not justified and that theoretically the supposed gory and violent takeover of robots is nothing but mass paranoia according to Informatics theorists Tchounikine and Weizenbaum. These collections of references created Riccardo, a robot who senses someone and runs away in fear to escape. This robot is meant to be an ironic comment on the aforementioned panic, showing the fear of a machinery that we created in contrast. Previous MAX classes done during our Licence with another professor, also included references of Donna Haraway’s ‘A Cyborg Manifesto’ a feminist essay talking about the symbiosis between the human and the machine in the future, furthering the interest in completing this robot in MAX MSP even further.
 Donna Haraway, A Cyborg Manifesto, 1985
Donna Haraway, A Cyborg Manifesto, 1985Work Process:
Since this Riccardo was meant to be a movement robot, it was imperative that he be disconnected from any cables and external devices; it needed to be autonomous. First the coding process started by creating a test patch which used a MIDI interface connected to a computer.
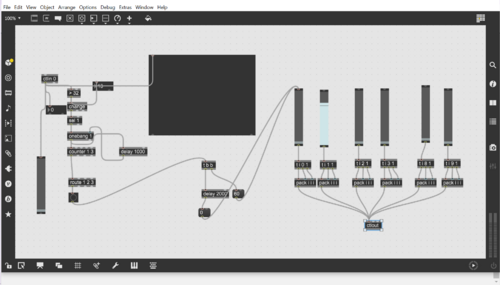
The coding consisted of a simple ctlin code which connected the proximity sensor to the max patch. The patch than filters and separates the collected noise data using change and then through the command sel there are bangs that are sent towards the onebang and a counter which loops forward. There is a delay added to the bang towards the counter in order to allow for the robot to stop moving. After rooting this information, the data is sent through a trigger towards triggers that are pertinent to motors and the actuator card and connected to the ctlout command which allows the information to affect the motors throughthe card and make them spin. From there the e-card was replaced with the ZIP card created by Interface-Z which is specifically made for Max and allows for autonomy in projects. The card has a limited list of elements that can be used from cycling, so the replacement patches for necessary elements such as ctlin, ctlout (ANA_IN_12BITS, PWM_OUT/2) were used. The logic of the ZIP adapted patch remains the same: the sensor collects data, it gets filtered separated and organized into triggers that through an actuator card can make the motors, and thus the robot, move.

Obviously, the sensor that was used was a proximity sensor which was directly connected to the ZIP card through the 48 entry. To make the card autonomous, the project patch got tested and uploaded into a special patch created by Interface-Z which is specifically designed to upload a patch into the ZIP e-card.

List of hardware: Proximity sensor, Power-bank, USB-C cable, ZIP e-card, actuator card, 12 volt motors, many, many cables and connecters.
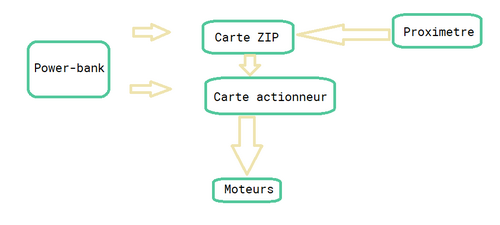
The zip card and the actuator card were both welded to a USB-C cable which connected to a 5-volt power bank which powered the cards and motors.
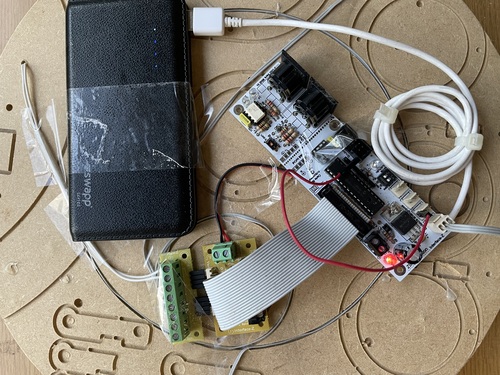
Here we faced another issue, that the motors were 12-volt, and the power bank fed nearly 3 times less than that. Adding an actual battery added other constraints that the power bank simplified, and seeing that the motors managed to move, just weren’t too powerful, we didn’t change the power bank.
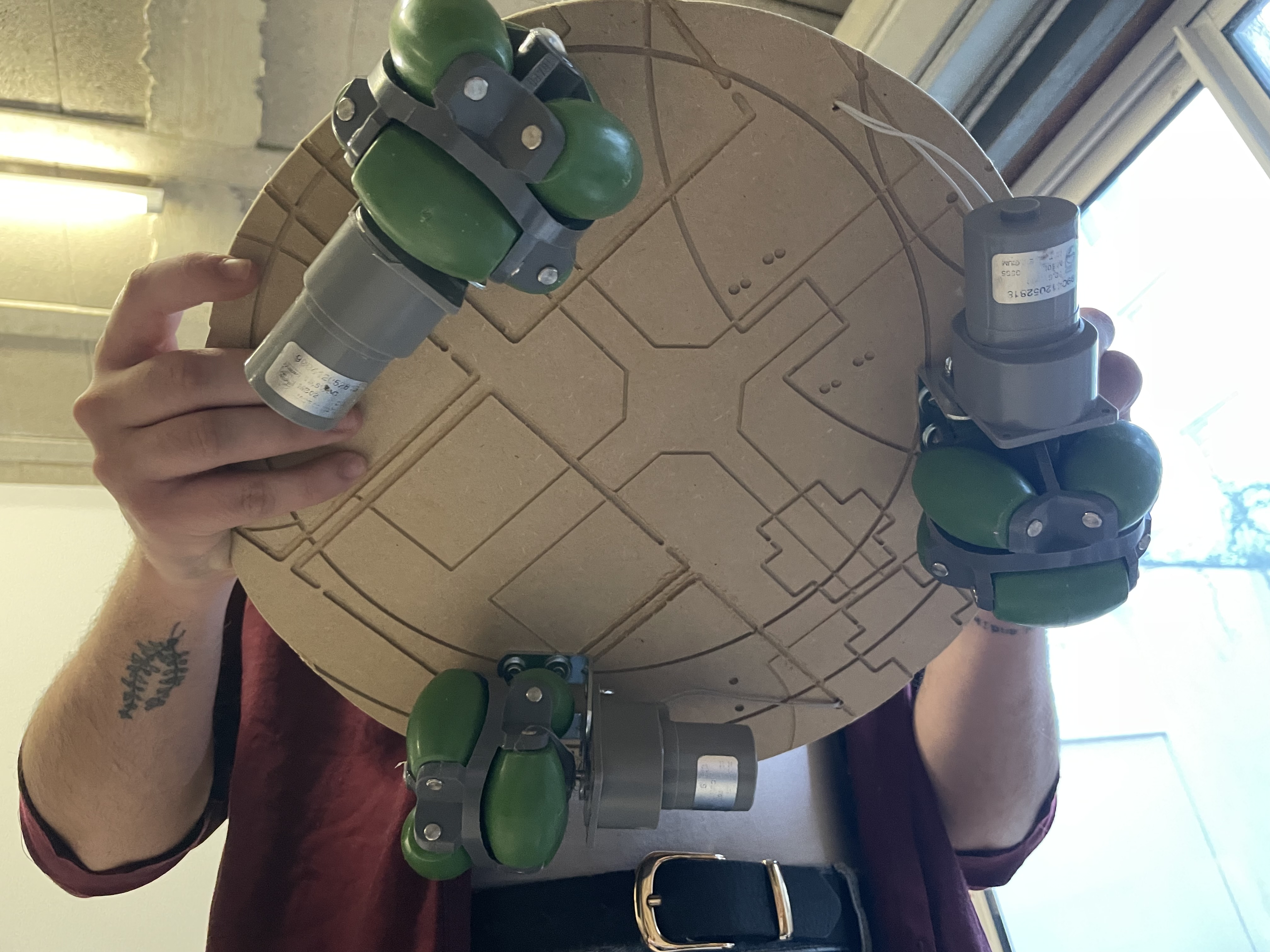
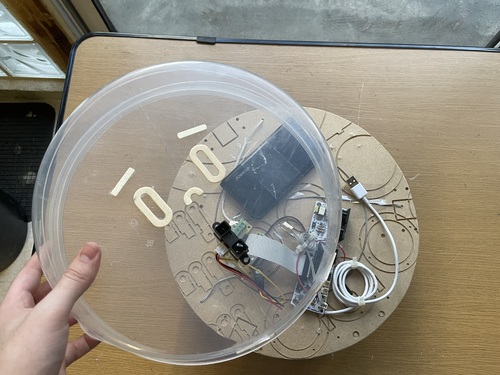
From there the construction process was mostly easy and aesthetically based. The material used for the base was wood in order to hold the weight of all the hardware, and it was cut in a circular shape in order to not limit the facing of the robot, his movement is random and deciding on a specific facing, limits this erratic flow.

The wheels chosen were omnidirectional to promote easier movement since the robot was lacking on the power department, and were drilled into the wood plank.

After arranging and gluing into place the hardware on top of the plank, a plastic transparent Tupperware was used as the head, with glued wood pieces to show a sad frightened face. The head was transparent in order to show the designs of the wood, but to also not cause any confusion; differently from Cassandra, this is not a cute recreation of a “kawaii” character, it is meant to look like a robot. A scared, paranoid, panicked robot.
The robot succesfully completed the objective of erratically running away in fear when detecting someone in its proximity, as evidently shown in the Demonstration video:
Final Notes:
Despite its successful completion, there is a lot that i would want to improve upon with my robot. Firstly, i would like to fix the energy issue of the robot so the erratic movement is powerful and fast in order to fully display the panic. Secondly, i would like to change the head of Riccardo, possibly adding a custom and transparent demi-sphere instead of the tupperwear for uniformity and aesthetical reasons. Finally, i would combine Riccardo and Cassandra into a fully moving, fully conversive robot. I am confident that one day i will create a third prototype which will be the fruit of the labour that was put into these two robots, with a combination of the features of its predecessors.
 Tags : proximètre
Tags : proximètre
-
Commentaires
Aucun commentaire pour le moment Suivre le flux RSS des commentaires
Suivre le flux RSS des commentaires
Vous devez être connecté pour commenter
Dispositifs & installations interactifs, automatisés, motorisés, lumineux...
-
Accéléromètre Action Avatar Bouton Capacitif Conte Distance EVMAN Enfant Escape room Flexion Inclinomètre Installation Instrument Inter Lume Isadora Jeu Joystick L2 L3 LED Luminosité Lumière M1 Magie Max Micro Mouvement Musique Performance Piézo Poids Potentiomètre Pression Force Processing Proximètre Pyroélectrique Ribbon Souffle Tableau Tapis sensitif Température Volume sonore capteur installation jeu mouvement pression proximètre son
Voir tous les tags