-
Le voyage de Noël
Ellia Benoist EVMAN L3
Le voyage de Noël
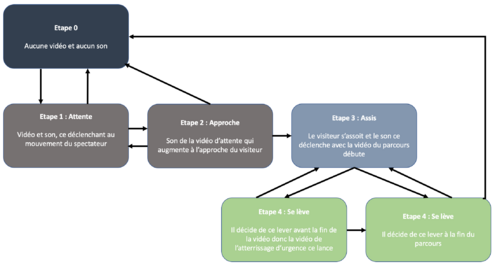
Ce projet est un parcours permettant aux enfants de survoler la ville, avec le père noël dans son traîneau. Ce dispositif est réparti en plusieurs étapes, afin de pouvoir répondre aux éventuels changements du comportement des enfants.
L’étape 0 consiste à avoir aucune image et aucun son, afin de mettre en « veille » le dispositif quand aucun visiteur n’est détecté.
L’étape 1 est la phase d’attente, une vidéo d’un décor enneigé défile avec le bruit de grelot de noël.
L’étape 2 est la phase d’approche du visiteur, plus celui-ci s’approche du dispositif, plus le son augmente.
L’étape 3 est le moment où on décide de s’assoir sur le dispositif, afin de lancer la vidéo de présentation du parcours. Cette vidéo est accompagnée des commentaires du père noël, ainsi que d’une musique.
L’étape 4, comporte deux solutions possibles, soit le visiteur décide de rester assis jusqu’à la fin du parcours et passe à l’étape 5, qui est le rangement des rennes. La deuxième possibilité et qu’il se lève avant la fin du parcours, dans ce cas l’étape d’atterrissage d’urgence s’enclenche avant de passer à l’étape 5.
Cependant, plusieurs alternatives existent. Si on passe seulement devant le dispositif, celui-ci s’enclenche avec la vidéo d’attente et passe à l’étape 0. Il est possible aussi de ce lever du traineau et de rester juste devant l’écran avant de vouloir se rasseoir, ce qui lance la vidéo du parcours.
Schéma fonctionnel
Explications

La partie vidéo a dû être réglée, afin de pouvoir envoyer la vidéo de l’étape 5 seulement si le visiteur était allé au bout de la vidéo de l’étape 3. Pour cela l’objet « loop » a été mis en place. Le lecteur a été basé sur « jit.movie », avec un démarrage de l’objet par « qmetro » et une lecture de vidéo par « coll ». La luminosité a été contrôlée par « jit.brcosa », plus particulièrement pour l’étape 0, afin d’avoir un fond noir. À la suite du changement de luminosité j’ai dû ajouter au « trigger », « s luminosite », afin de pouvoir visualiser les visuels.
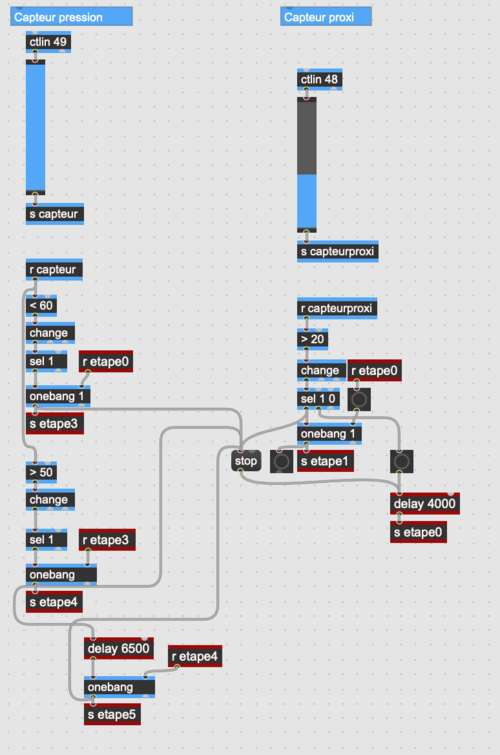
J’ai aussi ajouté des « onebang » aux capteurs, afin de pouvoir lancer l’étape suivante, quand il passait à « >50 » cela voulait dire que le spectateur se levait, donc lancer automatiquement l’étape 4. Ce qui conduisait ensuite à un « delay » avant de passer à l’étape 5.
De plus, le capteur proxi a été réglé pour que dès qu’il détecte un mouvement l’étape 1 démarre. Il a été fait en sorte que l’objet « stop » soit relié aux étapes du proxi, afin de ne pas interférer et couper la vidéo, au cas où le capteur ne les détecterait pas.
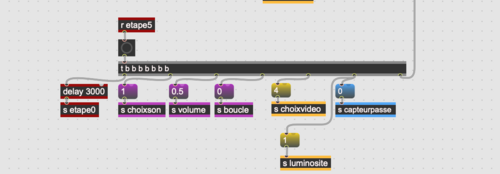
Il a été programmé qu’au bout d’un certain « delay 3000 » que l’étape 5 repasse automatiquement à l’étape 0, afin de mettre le dispositif en veille en attendant le prochain spectateur.
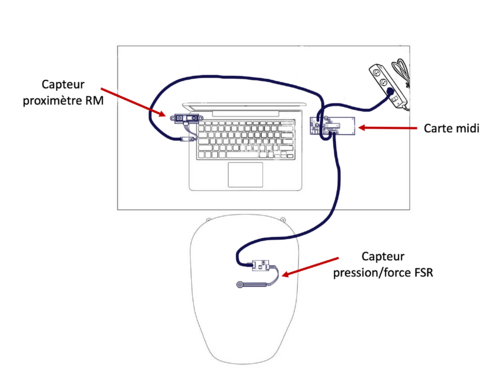
Image du dispositif
Liste des capteurs
1- Capteur proximètre RM
1- Capteur pression
Video de démonstration
 Tags : Distance, Pression Force, Poids
Tags : Distance, Pression Force, Poids
-
Commentaires
Aucun commentaire pour le moment Suivre le flux RSS des commentaires
Suivre le flux RSS des commentaires
Vous devez être connecté pour commenter
Dispositifs & installations interactifs, automatisés, motorisés, lumineux...
-
Accéléromètre Action Avatar Bouton Capacitif Conte Distance EVMAN Enfant Escape room Flexion Gyromètre Inclinomètre Installation Instrument Isadora Jeu Joystick L2 L3 LED Luminosité Lumière M1 M2 Magie Max Micro Mouvement Musique Performance Piézo Plante Poids Potentiomètre Pression Force Processing Proximètre Pyroélectrique Servomoteur Souffle Tapis sensitif Température Volume sonore capteur distance jeu max pression proximètre
Voir tous les tags





